Geometry Descriptions
DREAM3D-NX is capable of working with several different kinds of geometric grids that describe the spatial location of geometric features in regular cartesian space. There are three main types of geometric grids in DREAM3D-NX:
Regular Grid
Semi-Regular Grid
Unstructured Grids
Image Geom (Regular Grid)
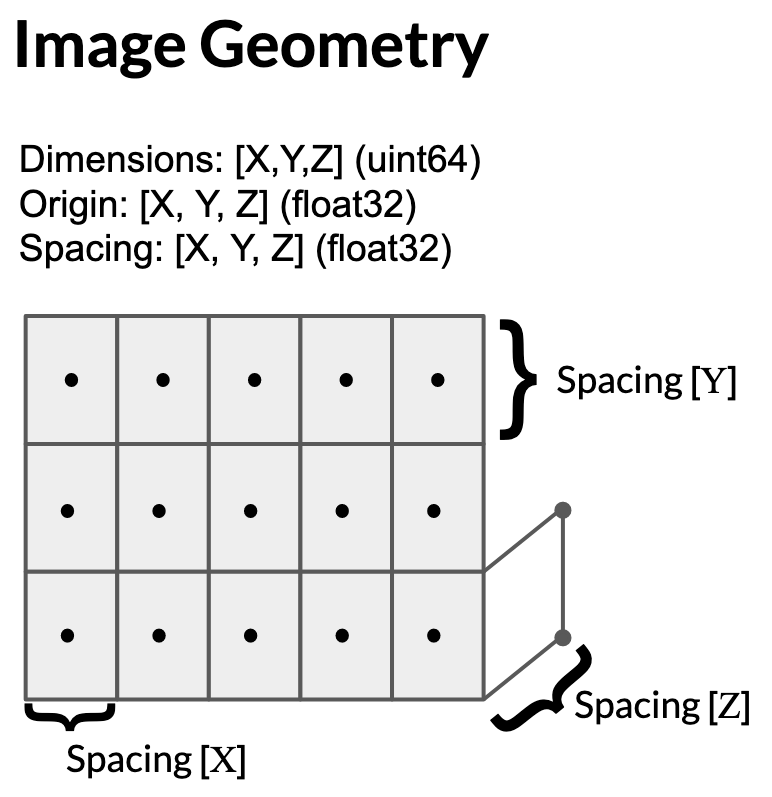
A structured grid, this Geometry is composed of pixels (in 2D) or voxels (in 3D) with constant spacing along each axis. The voxel is a primary three-dimensional cell. The voxel is topologically equivalent to the hexahedron with additional geometric constraints. Each face of the voxel is perpendicular to one of the coordinate x-y-z axes.
When creating an ImageGeometry the dimension values are specified as X, Y, Z, IN THAT ORDER since this is the most natural way to express a 3-dimensional cube. If you are going to be using an AttributeMatrix with the Image Geometry, note that the tuple dimensions will be given in ZYX order since the tuple dimensions are ALWAYS given in “C” order, or slowest to fastest order. The spacing value is also given as XYZ order and denotes the real units value of the distance that each voxel along that axis will span. The origin is also specified using 3 real length unit values that will locate the first voxel of the grid. The data is rastered from slowest dimension Z to the fastest moving dimension X in a positive direction.
For example if you set the dimensions at 10,10,10 and the origin of -10, -10, -10 and the spacing of 2.0, 2.0, 2.0 then the physical length of each side of the Image Geometry will be 20, 20, 20 units and have a physical bounds of (-10 to 10) length units in each direction.
Definition of Image Geometry
- class ImageGeom
- Variables:
dimensions – Returns dimensions of the Image Geometry in [XYZ] as integers
spacing – Returns the spacing of the Image Geometry in [XYZ] as float32
origin – Returns the origin of the Image Geometry in [XYZ] as float32
num_x_cells – Returns the number of Cells along the X Axis.
num_y_cells – Returns the number of Cells along the Y Axis.
num_z_cells – Returns the number of Cells along the Z Axis.
RectilinearGrid Geometry (Semi-Regular Grid)
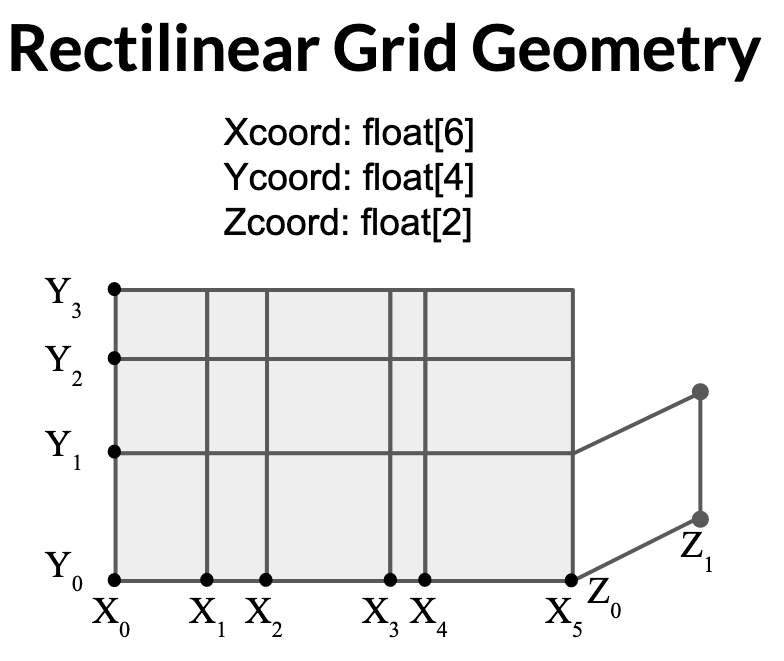
An rectilinear grid; this Geometry is composed of pixels (in 2D) or voxels (in 3D) with variable spacing along each axis. RectilinearGrid represents a geometric structure that is topologically regular with variable spacing in the three coordinate directions x-y-z. To define a RectilinearGrid, you must specify the dimensions of the 3 axis and provide three arrays of values specifying the coordinates along the x-y-z axes. The coordinate arrays are specified using three DataArray objects (one for X, one for Y, one for Z).
In the figure below, the geometry has dimensions of X=5, Y=3 and Z=1 but note that the number of values in each array is +1 from the dimension size.
Definition of RectGrid Geometry
- class RectilinearGrid
- Variables:
dimensions – Returns dimensions of the Image Geometry in [XYZ] as integers
num_x_cells – Returns the number of Cells along the X Axis.
num_y_cells – Returns the number of Cells along the Y Axis.
num_z_cells – Returns the number of Cells along the Z Axis.
x_bounds – Returns the axis values along the X Axis
y_bounds – Returns the axis values along the Y Axis
z_bounds – Returns the axis values along the Z Axis
# This code snippet assumes the developer has already generated the
# needed DataArrays and added them to the DataStructure through the proper
# CreateDataArrayFilter filters (or any other way)
result = nx.CreateGeometryFilter.execute(data_structure=data_structure,
array_handling= 1, # Move the arrays from their original location.
cell_attribute_matrix_name="Cell Data",
geometry_name=nx.DataPath(["RectGrid Geometry"]),
geometry_type=1,
x_bounds=nx.DataPath("RectGridCoords/X Coords"),
y_bounds=nx.DataPath("RectGridCoords/Y Coords"),
z_bounds=nx.DataPath("RectGridCoords/Z Coords")
)
if len(result.errors) != 0:
print('Errors: {}', result.errors)
print('Warnings: {}', result.warnings)
else:
print("No errors running the CreateGeometryFilter filter")
rect_grid_geom = data_structure[nx.DataPath(["RectGrid Geometry"])]
x_cell_count = rect_grid_geom.num_x_cells
print(f'num_x_cells: {x_cell_count}')
x_bounds = rect_grid_geom.x_bounds
print(f'x_bounds: {x_bounds.store.npview()}')
The output produced is:
num_x_cells: 9
x_bounds: [[0.]
[1.]
[2.]
[3.]
[4.]
[5.]
[6.]
[7.]
[8.]
[9.]]
Node Based Geometries (Unstructured Grid)
These are geometries that consist of an array of vertices (points) where each vertex is defined by a vector of 3 x 32 bit floating point values representing the X, Y, and Z value for that point. Each vertex could be shared by 0 or more higher order elements. The higher dimensional node geometries will also include a second array that defines the topology or connectivity of each element (edge, triangle, …) for that geometry. There are specific API functions that you can use to resize the Nodes/Edges/Faces/Cells of each node based geometry.
# Example, this will get a reference to the Edge Geometry
edge_geom: nx.EdgeGeom = data_structure[output_edge_geom_path]
# Now resize the edge geometry to have 30 Edges
edge_geom.resize_edges(30)
# Now resize the vertices to have 31 vertices
edge_geom.resize_vertices(31)
# Both of the resize operations will also resize any attribute matrix that is associated with the vertices and edges.
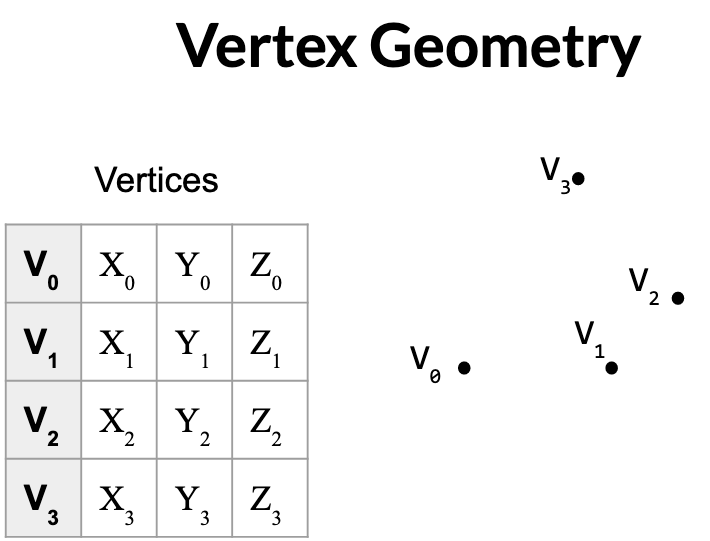
VertexGeometry
A collection of points, commonly referred to as a point cloud. The vertex is a primary zero-dimensional cell. It is defined by a single point.
Array of vertex positions - float[nV][3]: 12 bytes per vertex - (3 coordinates x 4 bytes) per vertex
Definition of Vertex Geometry
EdgeGeometry
A collection of edges defined by two vertices, forming lines. The line is a primary one-dimensional cell. It is defined by two points. The direction along the line is from the first point to the second point.
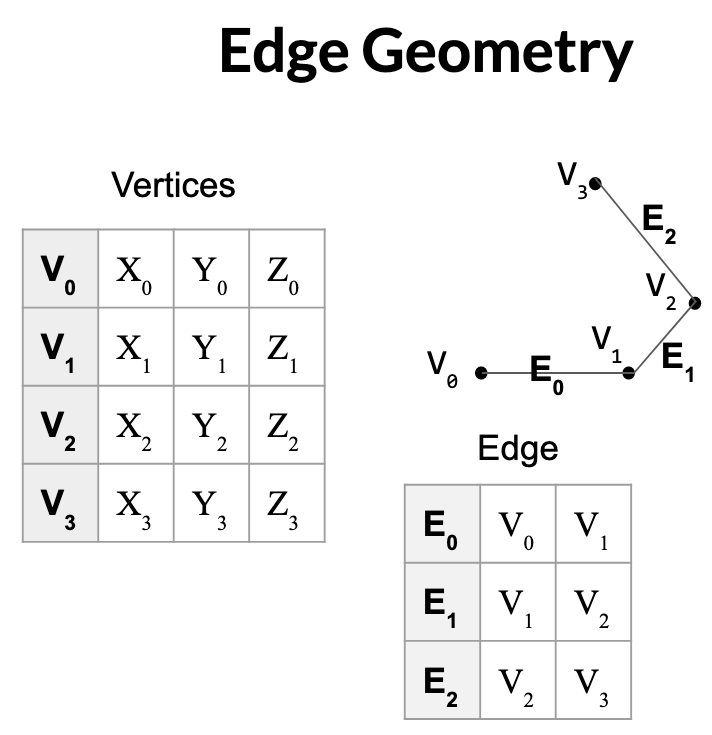
Definition of Edge Geometry
Inherits from VertexGeometry and adds the following:
array of pairs of indices (per edge)
(2 indices x 8 bytes) per edge
16 bytes per edge
represents topology and geometry separately
finding neighbors is at least well defined
TriangleGeometry
The triangle is a primary two-dimensional cell. The triangle is a primary two-dimensional cell. The triangle is defined by a counterclockwise ordered list of three points. The order of the points specifies the direction of the surface normal using the right-hand rule.
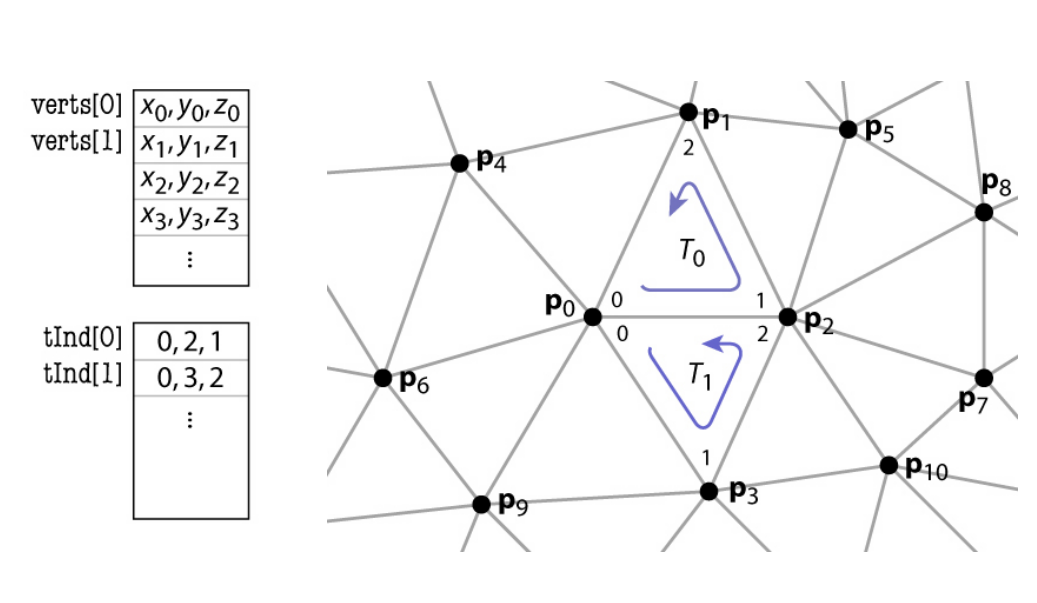
Definition of Triangle Geometry
Inherits from VertexGeometry and adds the following:
array of triples of indices (per triangle)
(3 indices x 8 bytes) per triangle
24 bytes per triangle
represents topology and geometry separately
finding neighbors is at least well defined
QuadGeometry
A collection of quadrilaterals; one type of surface mesh . The quadrilateral is a primary two-dimensional cell. It is defined by an ordered list of four points lying in a plane. The quadrilateral is convex and its edges must not intersect. The points are ordered counterclockwise around the quadrilateral, defining a surface normal using the right-hand rule.
Inherits from VertexGeometry and adds the following:
array of triples of indices (per quad)
(4 indices x 8 bytes) per quad
32 bytes per quad
represents topology and geometry separately
finding neighbors is at least well defined
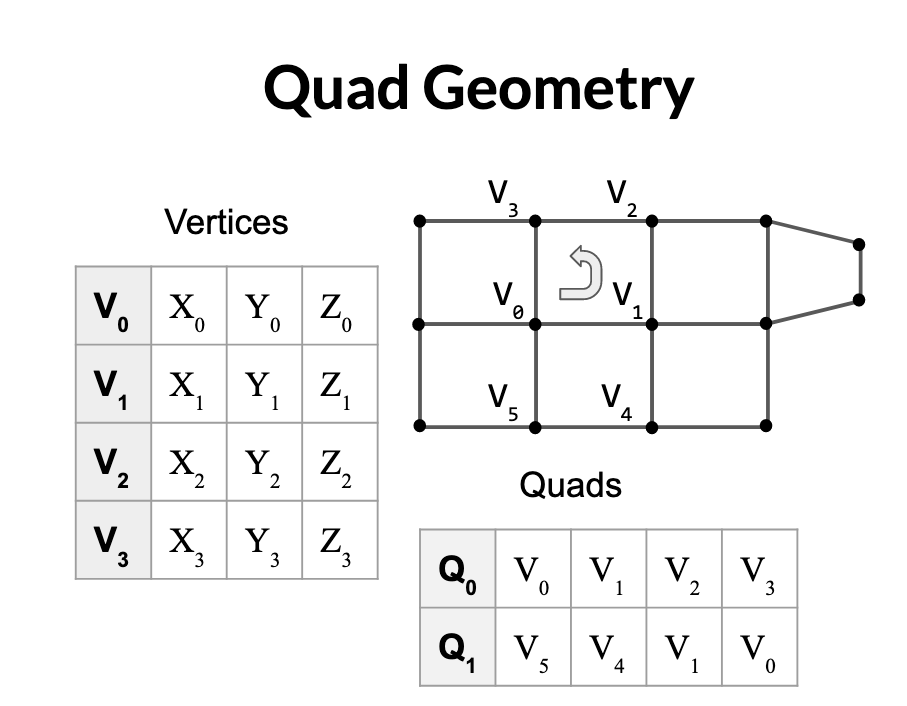
Definition of Quad Geometry
HexahedralGeometry
A collection of hexahedra; one type of volume mesh. The hexahedron is a primary three-dimensional cell consisting of six quadrilateral faces, twelve edges, and eight vertices. The hexahedron is defined by an ordered list of eight points. The faces and edges must not intersect any other faces and edges, and the hexahedron must be convex.
Inherits from QuadGeometry and adds the following:
array of triples of indices (per hexahedra)
(8 indices x 8 bytes) per hexahedra
64 bytes per hexahedra
represents topology and geometry separately
finding neighbors is at least well defined
TetrahedralGeometry
A collection of tetrahedra; one type of volume mesh. The tetrahedron is a primary three-dimensional cell. The tetrahedron is defined by a list of four non-planar points. The tetrahedron has six edges and four triangular faces.
Inherits from TriangleGeometry and adds the following:
array of triples of indices (per tetrahedra)
(4 indices x 8 bytes) per tetrahedra
32 bytes per tetrahedra
represents topology and geometry separately
finding neighbors is at least well defined