3.16. Orientation Utility
Description
This Utility allows the user to compute alternate representations of an orientation based on a another representation. The supported representations are:
Euler Angles
Axis Angle
Cubochoric
Homochoric
Orientation Matrix
Quaternion
Rodrigues
Stereographic Coordinates
To access the utility, go to the Tools menu in the menu bar and click on Orientation Utility.
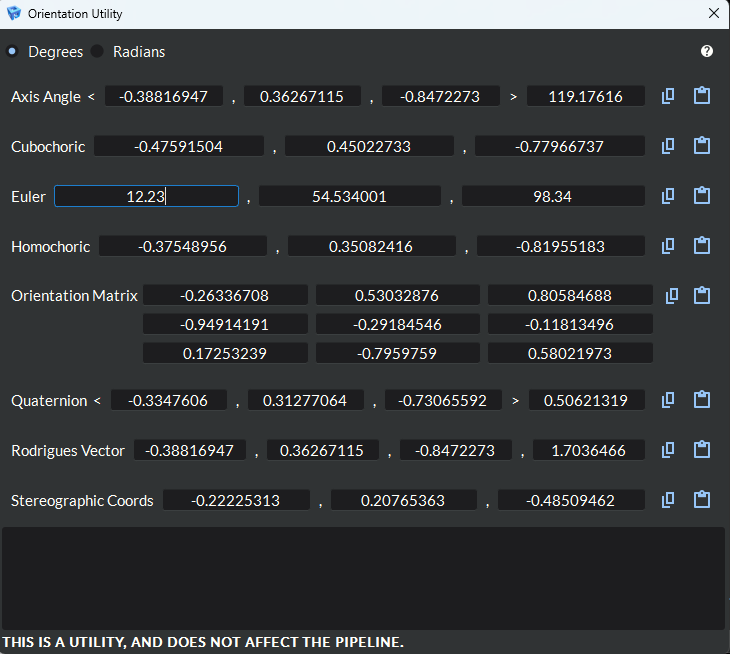
Figure 3.31 The Orientation Utility User Interface
To use the utility, simply start entering values for a representation. The other representations will be instantly calculated as shown in figure 1 below.
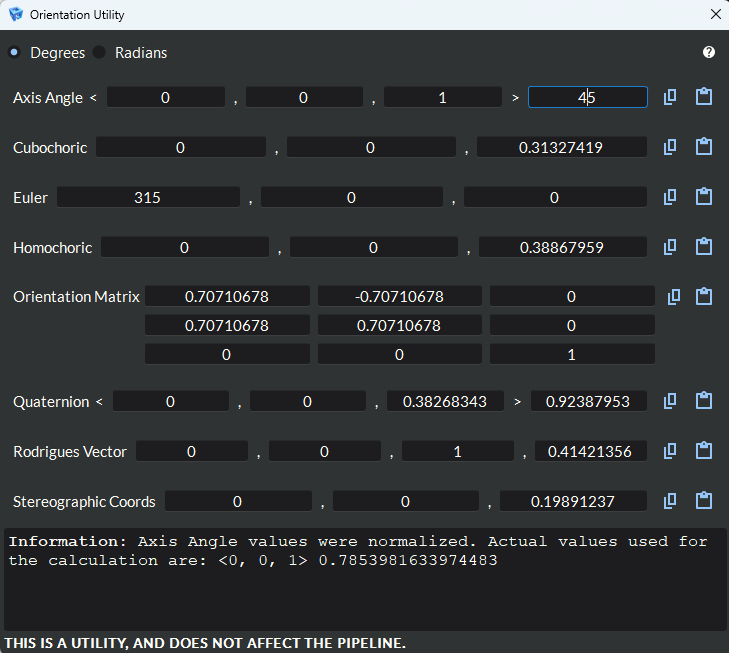
The Axis-Angle and Rodrigues vectors are automatically normalized for the user.
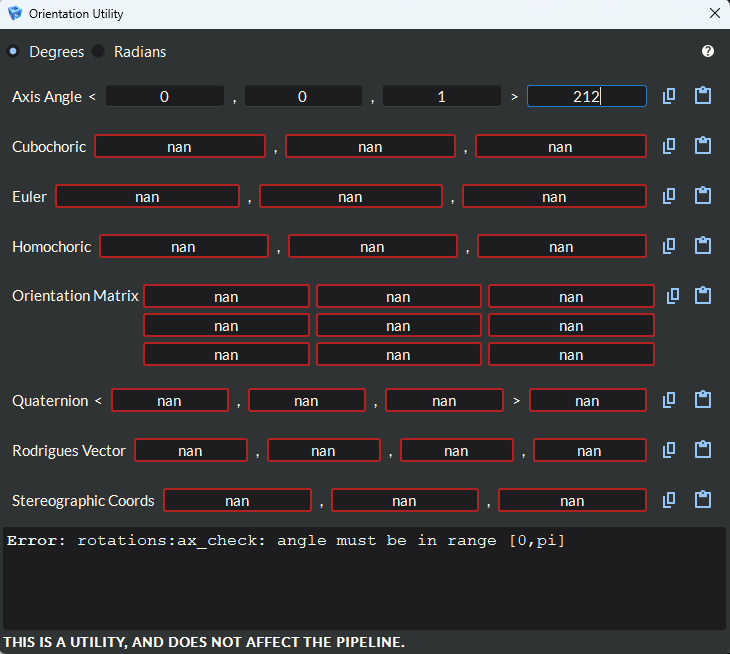
If the user enters invalid values for a representation, an error message will be displayed and all input fields will be marked with the NaN symbol as show in figure 2 below.